Отсек летательного аппарата класса "Воздух -Воздух"

Движение ЛА по заданной траектории осуществляется в том случае, когда действующие на него силы и моменты изменяются по определенным законам. Управление – процесс изменения этих сил и моментов для формирования требуемой траектории. Для управления движением ЛА в плотных слоях атмосферы широко применяются аэродинамические органы управления. Для преодоления шарнирного момента, возникающего при отклонении органа управления, необходим источник энергии – силовой привод. В данной работе произведен расчет пневматического силового привода, который имеет такие основные преимущества: простота устройства и функционирования; высокая надежность работы.
Данная работа включает в себя следующие части: конструкторская, спецчасть, технологическая, экономическая и охрана труда.
В конструкторской части работы разрабатывается конструкция отсека корпуса, проектируется соединение двух отсеков, рассчитываются основные элементы силового привода.
В спецчасти приведена методика расчета нагрузок, действующих на ЛА и инструкция для пользователя программы «НАГРУЗКА МК», разработанная по данной методике.
В технологической части разработан технологический процесс изготовления пластины, а также спроектирован штамп последовательного действия, оформлен комплект документов данного технологического процесса.
В экономической части рассчитана себестоимость пластины, ее оптовая и отпускная цены.
Заключительной частью данной работы является охрана труда, в которой произведен анализ вредных факторов производственного процесса при работе в литейном цеху.
Исходные данные на проектирование агрегата
Летательный аппарат, агрегаты которого спроектированы в данной работе, является ракета класса «воздух-воздух». Аэродинамическая схема – поворотное крыло. Расположение консолей Х-Х. Геометрические и массовые характеристики представлены в таблице 1.1. Компоновочная схема ЛА изображена на рисунке 1.1.
Таблица 1.1 – Характеристики летательного аппарата
|
Длина корпуса |
|
3,062 |
|
Длина носовой части корпуса |
|
0,582 |
|
Диаметр корпуса |
|
0,223 |
|
Размах консоли первых несущих поверхностей (НП) |
|
0,416 |
|
Расстояние от носка фюзеляжа до бортовой нервюры консоли первых НП |
|
1,604 |
|
Длина бортовой нервюры консолипервых НП |
|
0.565 |
|
Длина концевой нервюры консолипервых НП |
|
0,1 |
|
Размах первых несущих поверхностей |
|
1,054 |
|
Угол стреловидности по передней кромке первых НП |
|
33 |
|
Размах второй консоли |
|
0,268 |
|
Расстояние от носка фюзеляжа до бортовой нервюры консоливторых НП |
|
2,486 |
|
Длина бортовой нервюры консоли вторых НП |
|
0,536 |
|
Длина концевой нервюры консоли вторых НП |
|
0,01 |
|
Размах вторых несущих поверхностей |
|
0,759 |
|
Угол стреловидности по передней кромке вторых НП |
|
63 |
|
Стартовая масса ЛА |
|
233 |
|
Скорость полёта |
|
1020 |
|
Число М |
|
3 |
|
Расчётная нормальная перегрузка |
|
10 |
|
Тяга двигателя |
|
48930 |
|
Расстояние от носка корпуса до точки приложения тяги двигателя |
|
2 |
|
Высота полёта |
|
10000 |
|
Угол атаки |
|
16 |
|
Давление на высоте 10000 м |
|
26499,9 |
|
Температура на высоте 10000 м |
|
223,252 |
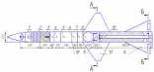
Рисунок 1.1 – Компоновочная схема ЛА
1 −головка самонаведения + блок аппаратуры; 2 –боевая часть + детонатор; 3 – предохранительный исполнительный механизм; 4 – взрыватель; 5 – автопилот; 6 – преобразователь тока; 7 – источник энергии; 8 – ВАД с редуктором; 9 – механизм рулевых машинок; 10 – механизм управления рулями; 11 – РДТТ; 12 – механизм управления элеронами; 13 – корпус; 14 – консоли крыльев; 13 – консоли оперения
- Расчет загрузок
- Проектировочный расчет фланцевого соединения отсеков корпуса
- Силовые приводы аэродинамических органов управления
- Конструкция и проектирование приводного вала
- Конструкция и проектирование рычага механизма управления
- Конструкция и проектирование соединения штока с рычагом
- Автоматизация определения нагрузок, действующих на ЛА
- Конструктивно-технологический анализ детали
- Проектирование штампа для листовой штамповки, выбор оборудования
- Расчет деталей штампа на прочность
- Расчет себестоимости изделия и цены единицы изделия
- Выявление и анализ опасных и вредных производственных факторов, действующих в рабочей зоне проектируемого изделия
- Разработка мероприятий по предотвращению или ослаблению возможного воздействия опасных и вредных производственных факторов на рабочих
Статьи о транспорте:
Навигационно-гидрографические условия
Азовское море
Берега. Западный и Восточный берега преимущественно плоски и однообразны, берега окаймлены песчано-ракушечными пляжами. Южный берег приглубь, опасностей почти нет, здесь находится Керченский пролив берега, которого немного возвышены.
Глубины и рельеф дна. Азовское море мелководно, ...
Расчёт тормозной силы
Эффективное торможение подвижного состава городского электрическоготранспорта является одним из главных условий безопасности движения. Критериемэффективности в этом случае является минимальный тормозной путь, что обеспечиваетсяпри максимально допустимой тормозной силе. При использовании одновремен ...
Проверочный расчет
Основными нагрузками на валы являются силы от передач. В данной работе силы на валы передают через насаженные на них червячное колесо, шкив и полумуфту. При расчетах принимают, что насаженные на вал детали передают силы и моменты валу на середине своей ширины.
Выполняют расчеты валов на статическ ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация