Силовые приводы аэродинамических органов управления

Требования к силовым приводам
Чтобы отклонить аэродинамические органы управления на заданный угол системой управления, необходимо преодолеть шарнирные моменты, возникающие на них. Эти функции возложены на силовые приводы органов управления, которые являются собственно исполнительными элементами системы управления полетом. Основной частью силового привода являются приводной двигатель, работающий в соответствии с поступающими сигналами управления. Причем эти сигналы должны быть предварительно усилены и преобразованы. Чаше всего усилитель - преобразователь и приводной двигатель конструктивно выполнены в виде одного агрегата, называемого рулевой машинкой (РМ).
РМ должны удовлетворять целому ряду требований:
высокий коэффициент усиления управляющего сигнала по мощности;
малую инерционность;
высокий КПД;
небольшую массу и малые габариты;
высокую надежность работы в заданном диапазоне внешних условий.
В зависимости от типа приводного двигателя различают РМ: пневматические, гидравлические, электромагнитные, электромеханические.
В рамках данного проекта будет выполнено проектирование пневматической РМ, как наиболее подходящей для заданного типа ЛА, обладающего небольшой массой, малым временем полета и умеренной скоростью.
![]()
Рисунок 1.14 − Кинематическая схема механизма отклонения консолей
Проектировочный расчет пневматического силового привода
В состав пневматического силового привода входят:
пневматические РМ;
баллон со сжатым воздухом (ВАД);
золотниковое устройство;
понижающие редукторы;
трубопроводы.
В результате проектировочного расчета могут быть получены линейные размеры РМ и ВАД, а также массовые характеристики привода.
Определение линейных размеров рулевой машинки

Рисунок 1.15 – Положение оси вращения поворотного крыла
Моменты сил, действующих на органы управления относительно оси вращения, называются шарнирными моментами и определяются уравнением:
![]()
![]() − расстояние от оси вращения крыла до центра давления (рисунок 1.14);
− расстояние от оси вращения крыла до центра давления (рисунок 1.14);
![]() – подъемная сила консоли крыла.
– подъемная сила консоли крыла.
Определим плече шарнирного момента,![]() :
:
![]()
![]() – средняя аэродинамическая хорда крыла.
– средняя аэродинамическая хорда крыла.
![]()
Определим величину шарнирного момента:
![]()
Для изготовления корпуса рулевой машинки используется алюминиевый сплав Д16ТГОСТ4784-97, с физико-механическими характеристиками:

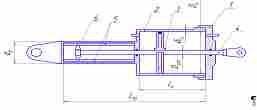
Рисунок 1.16 –Конструктивная схема рулевой машинки:
1 – крышка; 2 – корпус; 3 – поршень; 4 – шток; 5 – шкала потенциометра; 6 – скользящий контакт
Для изготовления штока используется Сталь 45 ГОСТ 1050-88, обладающие следующими физико-механические характеристики:
![]()
![]()
Для определения размеров рулевой машинки необходимо знать величину усилия ![]() , развиваемого приводом.
, развиваемого приводом.
Максимальное давление в рабочей полости силового цилиндра рулевой машинки![]() , тогда максимальный перепад давлений в рабочих полостяхрулевой машинки:
, тогда максимальный перепад давлений в рабочих полостяхрулевой машинки:
![]()
![]()
Ход поршня рулевой машинки составляет удвоенное произведение длинны рычага на синус наибольшего угла отклонения управляющей поверхности (рисунок 4.4):
![]()
Статьи о транспорте:
Определение затрат на основную оснастку
Оснастку подбирают по нормативу СН 309-90 «Временные нормы расхода запасных частей и материалов для ремонта машин, занятых в строительстве». Затраты на оснастку подсчитывают по формуле:
Soo = = (2×5500/7000) + (2×3200/7000) + (4×410/1400) + (4×410/1400) + (4×435/140 ...
Описание цеха текущего отцепочного ремонта
Текущий отцепочный ремонт вагонов производится на 22 пути.
Путь 22 оборудован одной парой домкратов УДС грузоподъемностью 50 т., козловым краном грузоподъемностью 5 т., сварочный аппарат ВДУ-506, воздушной колонкой для опробования тормозов, колонкой для подключения пневмоинструмента.
Кроме переч ...
Механизм подъёма и
опускания
1 – вал; 2 – подвеска; 3 – шкала; 4 – маховичок; 5 – стоп – фиксатор; 7 – тяга; 8 – рычаг;
9 – рычаг; 10 – дозатор; 11 – боковая рама; 12 – палец рычага; 13 – часть паза подвески;
Рисунок №4 – Механизм подъёма и опускания.
Механизм подъема, опускания и регулирования дозатора служит для подъем ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация