Статические и динамические характеристики автоматического регулятора прямого действия

Восстанавливающие силы на режимах минимальных оборотов и минимальных оборотов холостого хода:
![]() Н.(2.24)
Н.(2.24)
![]() Н.(2.25)
Н.(2.25)
Характеристики ![]() (см. рис. 2.1) позволяют определить разность:
(см. рис. 2.1) позволяют определить разность:
![]() Н.(2.26)
Н.(2.26)
которая показывает изменение восстанавливающей силы регулятора, приведённой к центру тяжести груза, на номинальном регулируемом скоростном режиме при перемещении регулирующего органа от полной подачи топлива до подачи холостого хода. Тогда величина изменения восстанавливающей силы, приведённой к муфте регулятора, определится как:
![]() Н.(2.27)
Н.(2.27)
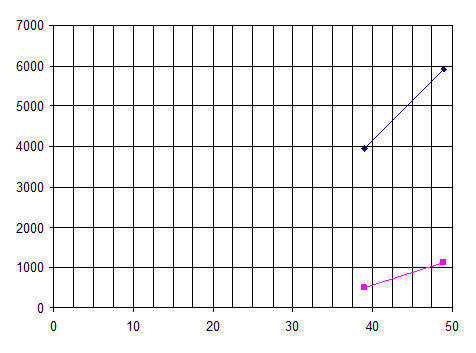
Рис. 7 - Зависимости восстанавливающей силы ![]() и поддерживающей силы
и поддерживающей силы ![]() , приведенных к центру тяжести грузов от радиуса r для механического регулятора
, приведенных к центру тяжести грузов от радиуса r для механического регулятора
Определяем жёсткость пружины:
![]() Н/м.(2.28)
Н/м.(2.28)
Величина предварительной деформации пружины:
![]() мм.(2.29)
мм.(2.29)
Максимальная деформация:
![]() мм.(2.30)
мм.(2.30)
Равновесные характеристики ![]() являются основными статическими характеристиками регулятора (см. рис. 8). Каждой настройке регулятора соответствует
являются основными статическими характеристиками регулятора (см. рис. 8). Каждой настройке регулятора соответствует
своя равновесная характеристика.
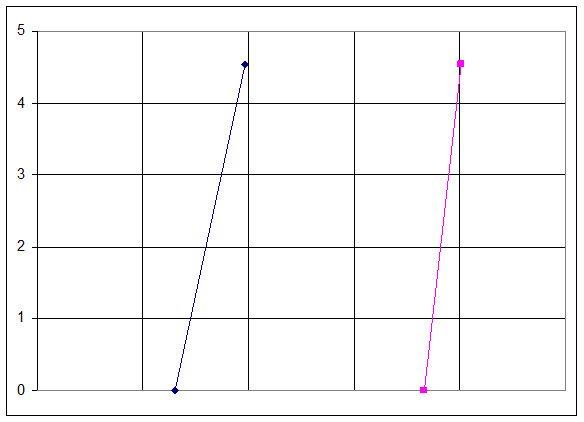
Рис. 8 - Равновесные характеристики регулятора для минимальной 1–2 и максимальной 3–4 затяжки пружины
К статическим характеристикам регулятора относится и фактор его устойчивости:
![]() ;(2.31)
;(2.31)
где А - инерционный коэффициент поддерживающей силы.
![]() (2.32)
(2.32)
где ![]() Н - определяется из графика (см. рис. 2.1).
Н - определяется из графика (см. рис. 2.1).
Динамика регулятора
Динамические свойства регулятора для случая постоянства его настройки могут быть
исследованы с помощью уравнения движения регулятора:
![]() ,(2.33)
,(2.33)
или в операторной форме:
![]() ,(2.34)
,(2.34)
где ![]() - собственный оператор регулятора,
- собственный оператор регулятора,
![]() (2.35)
(2.35)
![]() и
и ![]() - безразмерные выходная и входная координата регулятора;
- безразмерные выходная и входная координата регулятора;
![]() - время регулятора прямого действия;
- время регулятора прямого действия;
![]() - время катаракта;
- время катаракта;
![]() - местная степень неравномерности регулятора.
- местная степень неравномерности регулятора.
Статьи о транспорте:
Характеристика АРП
Предприятие, находящееся в городе Рязань, занимается ремонтом автомобилей ЗИЛ-130. Ремонтируемые автомобили эксплуатируются во второй категории эксплуатации, которая характеризуется умеренно-тёплым, влажным климатом. Авторемонтное предприятие работает в одну смены, 365 дней в году. Ежегодно предпр ...
Обоснование типа пересечения и примыкания
Выбор типа пересечения и примыкания осуществлен на основании [24, стр. 154]. С учетом категорий главной и второстепенной дорог назначаем примыкание типа III - 3 - С и пересечение типа III - 1 - П.
Проектирование плана примыкания и пересечения выполнено на ситуационном плане в масштабе 1:50 (лист ...
Технологический процесс ТО-1 и ТО-2, применяемое оборудование
Основным назначением ТО-1 и ТО-2 является снижение интенсивности изнашивания деталей, выявление и предупреждение отказов и неисправностей путем своевременного выполнения контрольно-диагностических, смазочных, крепежных, регулировочных и других работ.
ТО-1 заключается в наружном осмотре автомобиля ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация