Автоматизация определения нагрузок, действующих на ЛА

Суммарную массовую нагрузку определяем как сумму массовых нагрузок от линейного поперечного ускорения и от углового ускорения:
![]()
Массовая нагрузка от линейного продольного ускорения определяется формулой
![]()
![]() - величина продольной перегрузки;(2.33)
- величина продольной перегрузки;(2.33)
![]() –тяга двигателя.
–тяга двигателя.
Характер эпюр массовых нагрузок, приложенных к корпусу ЛА, показан на рисунке2.7.
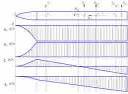
Рисунок 2.7 – Схема приложения уравновешивающих массовых нагрузок к корпусу ЛА
После определения всех нагрузок и уравновешивания корпуса строят эпюры поперечных сил ![]() , изгибающих моментов
, изгибающих моментов ![]() , продольных сил
, продольных сил ![]() и сжимающих сил
и сжимающих сил ![]() .
.
Уравнения, выражающие зависимость продольной силы ![]() от координаты
от координаты ![]() по участкам:
по участкам:
![]()
Система уравнений для построения эпюр осевой силы по участкам имеет вид:

Уравнения, выражающие зависимость поперечной силы ![]() от координаты
от координаты ![]() по участкам:
по участкам:
![]()
Система уравнений для построения эпюр поперечной силы по участкам имеет вид:

Для построения эпюры изгибающего момента необходимо проинтегрировать ![]() по координате
по координате ![]() :
:
![]()
Система уравнений для построения эпюр изгибающего момента по участкам имеет вид:
 (2.39)
(2.39)
Определение эквивалентной сжимающей нагрузки ![]() . Уравнение, выражающие зависимость
. Уравнение, выражающие зависимость ![]() от координаты
от координаты ![]() имеет вид:
имеет вид:
![]()
Рассмотренный алгоритм реализован в программе «Нагрузка МК». Программа разработана в математическом пакете Mathcad 14. Инструкция пользователю приведена в Приложении Б.
Программа «Нагрузка МК» внедрена в учебный процесс.
Статьи о транспорте:
Стенды регулировки углов установки колес
Рассмотрим диагностические стенды для регулировки углов установки колес, пользующиеся наибольшим спросом на рынке диагностического оборудования.
Стенд КДС-5К Т
Компьютерный диагностический стенд КДС-5К Т предназначен для регулировки углов установки управляемых колёс грузовых автомобилей и автобу ...
Требования пожарной безопасности к производственным
подразделениям автогаража
В колхозах и совхозах база автогаража является частью производственной базы хозяйства по ремонту, техническому обслуживанию и хранению техники. Поэтому руководители хозяйств, выбирая территорию под производственные помещения автогаража, должны учитывать направление господствующих ветров и располож ...
Условия проведения проверки технического состояния тормозного управления
АТС подвергают проверке при «холодных» тормозных механизмах. «Холодный» тормозной механизм - тормозной механизм, температура которого, измеренная на поверхности трения тормозного барабана или тормозного диска, менее 100 °С.
Шины проверяемого на стенде АТС должны быть чистыми, сухими, а давление в ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация