Силовые приводы аэродинамических органов управления

![]() –конструктивно принятая длина рычага;
–конструктивно принятая длина рычага;
![]() – величина максимального угла отклонения руля.
– величина максимального угла отклонения руля.
![]() .
.
Максимальную скорость перемещения поршня определяем из кинематической схемы (рисунок 1.17):
![]()
![]() – величина угловой скорости отклонения руля.
– величина угловой скорости отклонения руля.
![]() .
.
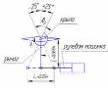
Рисунок 1.17–Кинематическая схема механизма управления
Определим максимальный нагрузочный момент:
![]()
![]() – величина шарнирного момента руля.
– величина шарнирного момента руля.
![]() – количество поверхностей, которыми управляет рулевая машинка.
– количество поверхностей, которыми управляет рулевая машинка.
![]()
Определим величину усилия, развиваемого приводом:

![]() – количество рулевых машинок;
– количество рулевых машинок;
![]() – количество поверхностей, которыми управляет рулевая машинка.
– количество поверхностей, которыми управляет рулевая машинка.
![]()
Определим эффективную площадь поршня:
![]()
![]()
Определим длину цилиндра:
![]()
![]()
Определим длину штока:
![]()
![]()
Диаметр штока рассчитывается из условия потери устойчивости (рисунок 1.18).
![]()
Рисунок 1.18 − Расчетная схема для определения диаметра штока


Принимаем ![]() .
.
Определим диаметр силового цилиндра:


Принимаем ![]()
Диаметр корпуса датчика обратной связи:
![]()
![]()
Толщина стенки силового цилиндра ![]() определяется из условий прочности, а ее значение рассчитывают по формуле:
определяется из условий прочности, а ее значение рассчитывают по формуле:
![]()
![]() – коэффициент безопасности силового цилиндра.
– коэффициент безопасности силового цилиндра.
![]()
Принимаем ![]()
Наружный диаметр силового цилиндра:
![]()
![]()
Общая длина рулевой машинки:
![]()
![]()
Определение размеров баллона со сжатым воздухом
Сжатый воздух, используемый в качестве рабочего тела в рулевых машинках, на борту ЛА хранится в специальных баллонах воздушных аккумуляторах давления(ВАД) под большим давлением ![]() .
.
В качестве материала ВАДа принимаем титановый сплав ВТ14
ГОСТ 19807-91, обладающий следующими физико-механическими свойствами:
![]()
![]()
Статьи о транспорте:
Экипаж тепловоза
К экипажной части тепловоза относятся те его узлы и конструкции, которые служат для размещения дизеля, передачи и вспомогательного оборудования, а также для создания (во взаимодействии с рельсами) силы тяги, передачи горизонтальных усилий (тяговых, тормозных) к составу и вертикальных нагрузок на р ...
Экономическая оценка мероприятий по снижению себестоимости перевозок в ООО
«Гардез»
Величина себестоимости перевозок отражает деятельность транспортных предприятий во всех его службах и подразделениях.
Главнейшие мероприятия по снижению себестоимости могут быть определены из следующих положений. Эксплуатационные расходы подразделяют на зависящие от пробега (т. е. от объема перев ...
Определение пути разгона
Интегрирование пути по времени разгона автомобиля в интервалах также затруднительно из-за отсутствия аналитической связи между скоростью V и временем разгона t .Условно можно считать, что в каждом интервале скоростей автомобиль движется равномерно со средней скоростью.
Vср1 =0, 5*(V1 + V2)
V1 –с ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация