Построение кривых движения и тока подвижного состава в прямом и обратном направлениях

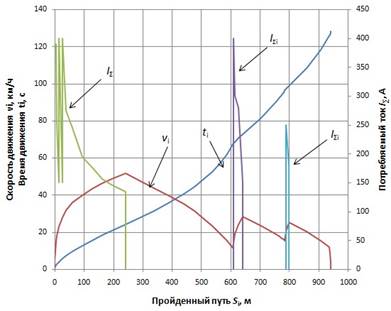
Рисунок 10 – Кривые движения троллейбуса по перегону в прямом направлении, зависимость потребляемого тока от пройденного пути.
Кривые движения подвижного состава в обратном направлении по заданному перегону строятся графическим способом по методу Министерства путей cообщения (МПС).
Первой строят кривую скорости v(S), а затем кривую времени хода t(S) и потребляемого тока I∑(S). Для построения кривых скорости v(S) и времени t(S) сначала выбираем масштабы скорости mv = 1 мм/(км/ч), пути ms = 0,1 мм/м и времени mt = 1 мм/с.
Масштаб удельных сил действующих на подвижной состав mf, мм/(Н/кН),рассчитывается по формуле
mf = ,
где mv – масштаб скорости, мм/(км/ч);
ms – масштаб пути, мм/м.
mf = мм/(Н/кН)
В масштабе вычерчивают диаграммы ускоряющих и замедляющих сил f0, wox и bто сл действующих на подвижной состав на прямом горизонтальном участке пути. Причём по оси абсцисс откладывают значения удельных сил, а по оси ординат скорость v.
Справа от диаграммы действующих сил с учётом выбранных масштабов строится кривая v(S). По оси ординат при построении кривой v(S) откладывается скорость, а по оси абсцисс путь. Рекомендуется при построении отступить от кривой bто сл до оси v на расстояние не менее Б, мм, которое вычисляется по формуле ![]()
Б = 
где mt – масштаб времени, мм/с.
Б = ![]() мм.
мм.
Под осью S графически представляется профиль пути.
Алгоритм построения кривых движения графическим способом аналогичен расчётно-графическому способу. Задаваясь значениями приращения скорости Δvi на каждом i-том шаге построения по зависимостям удельных действующих сил определяется среднее значение силы fдср i. Приращения пути ΔSi на каждом шаге определяется графическим способом. Кривые движения ПС представлены в приложении А.
Статьи о транспорте:
Безопасность жизнедеятельности
Пройдя экскурсии по заводу, цеху, инструктажи по технике безопасности и охране труда, работая в цехе можно сделать вывод, что на данном предприятии условия работы в цехе соответствует нормам и требованиям техники безопасности и экологии. Работа ведется в 3 смены, имеются 2 технических перерыва по ...
Анализ зарубежных снегоочистителей
Анализ конструкций зарубежных снегоочистителей показывает, что за границей получили распространение снегоочистители на базе погрузчиков.
Анализ конструкций снегоочистителей показывает, что в нашей стране не выпускаются снегоочистители, разработанные для функционирования с тракторами класса тяги 3 ...
Расчет характеристики амортизатора
Амортизатор, предназначенный для гашения колебаний колес и кузова, повышает плавность хода автомобиля, устойчивость движения,
Долговечность упругих элементов и шин. Решающее влияние на все указанные выше качества автомобиля оказывает правильный выбор характеристики амортизатора, т.е. правильный в ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация