Кинематические свойства

Высокое расположение центра крена W может быть получено только за счет наклона стойки (т. е. нежелательно большого угла δо поперечного наклона оси поворота) или нежелательного наклона нижнего рычага (рис. 2). Таким образом, центр крена расположен не выше (как часто полагают), чем в подвеске на двойных поперечных рычагах; более того, при нагружении он опускается в большей степени. На изменение колеи, как и на изменение развала, здесь повлиять труднее, чем при двойных поперечных рычагах. Изменение развала становится особенно неблагоприятным, если для получения меньшего перераспределения колесных нагрузок на повороте центр крена (например на переднеприводном автомобиле) должен располагаться спереди низко или же для устойчивости прямолинейного движения желательно иметь лишь небольшое изменение колеи. Стойка располагается тогда почти вертикально, а нижний рычаг практически не имеет подъема от нагруженного шарнира к внутреннему (рис. 2.1).
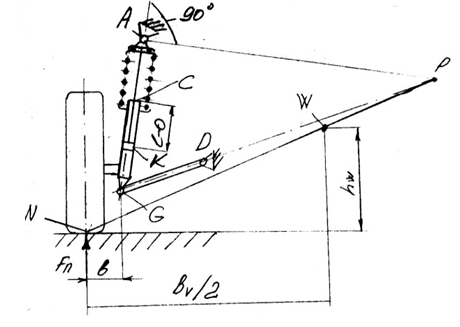 |
Рис. 2. Направляющая стойка с соосной пружиной.
Чем больше наклон нижнего рычага GD, тем выше расположены наклон Р и центр крена W, который определяется соединением точек Р и N. Недостатком такого решения может считаться большое изменение колеи. Приложенная в точке N вертикальная сила Fn дает на плече b момент, который должен восприниматься в стойке двумя скользящими опорами С и К.
При сохранении высоты hw центра крена кинематические свойства могут быть улучшены удлинением нижнего рычага до точки D2 вместо D1. Однако такая возможность может быть осуществлена только в задних подвесках, спереди же наибольшую длину рычагов определяет ширина расположенных рядом двигателя и агрегатов.
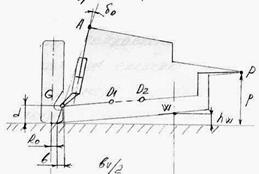
Рис. 2.1 Схема для определения центра крена
Чем более отвесно установлена пружинная или амортизаторная стойка и чем ближе к горизонтали положение нижнего рычага GD, тем меньше высота hw центра крена W, следствием чего является неблагоприятное изменение развала при ходе сжатия. Удлинением нижнего рычага (GD2 вместо GD1) можно улучшить кинематические свойства. Для получения малого или отрицательного плеча обкатки Ro точка G должна быть смещена наружу, в пространство колеса; в результате благоприятно уменьшается плечо b действия вертикальной силы Fn (b = Ro + d tg δo). Чем короче отрезок b, тем меньше опасность заклинивания в направляющей и на поршне и меньше силы в опорных точках D, А, G.
Экономичнее всего поручить исполнение функций нижнего направляющего элемента в продольном направлении стабилизатору. Однако плечи стабилизатора перемещаются по дуговым траекториям и поэтому при ходах подвески смещают поперечные рычаги подвески вперед или назад в точках прикрепления. Эти отклонения могут быть компенсированы применением длинных плеч стабилизатора, однако это связано с увеличением диаметра, т. е. повышенной массой и стоимостью.
Если стабилизатор расположен перед осью колес, то его спинка для обеспечения требуемого дорожного просвета размещается высоко. Направленные назад плечи стабилизатора опускаются от спинки к концам, что приводит к расположению центра продольного крена перед осью колес. В результате передняя часть кузова при торможении дополнительно подтягивается вниз. Этот недостаток можно было бы устранить размещением стабилизатора, выполняющего и направляющие функции, позади колес. Если стабилизатор не исполняет направляющих функций, как показатель экономичности, он может иметь короткие плечи и при меньшем диаметре – более высокую приведенную жесткость.
Изменение развала под действием боковых сил на повороте, приложенных в точке контакта колеса, меньше, чем в подвеске на двойных поперечных рычагах. Массовые обследования, выполненные в лаборатории шасси Высшего технического училища г. Кельна, дали следующую среднюю величину (при исключении податливости диска колеса): ∆γ5 = 22′ на 1 кН боковой силы. В подвесках на двойных поперечных рычагах это значение несколько выше: 25′.
Статьи о транспорте:
Определяем суточную программу автомобилей на АТП
Определить сменную программу для автомобиля на АТП
NiСМ=
NiГ –годовое число ТО по каждому виду воздействия
ДРЗ − число дней работы соответствующего подразделения
С − число смен соответствующего подразделения
С = 1 /1,табл 9.12. с 33/
Определяем число смен для объекта проектирован ...
Определение потребности АТП в технологическом оборудовании
К технологическому оборудованию относятся стационарные и переносные станки, стенды, приборы, приспособления и производственный инвентарь (верстаки, стеллажи, столы, шкафы), необходимые для обеспечения производственного процесса АТП. Технологическое оборудование по производственному назначению подр ...
Устройство и принцип действия карбюратора
Карбюратор K-88АМ (двигатель автомобиля ЗИЛ-130). Этот карбюратор двухкамерный, с падающим потоком и сбалансированной поплавковой камерой. Обе камеры работают параллельно на всех режимах. Каждая камера с двумя диффузорами подает горючую смесь к четырем цилиндрам двигателя. Поплавковая камера, уско ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация