Расчет параметров рабочих органов

1) Вылет рабочего органа (захвата лесопогрузчика или кромки ковша строительного погрузчика) L, мм:
L=(Bт/2)+∆b, (16)
где Вт – ширина транспортного средства принимается по характеристикам автомобилей и лесовозных автопоездов.
∆b – расстояние между погрузчиком и транспортным средством при перегрузке, равное 150 – 200 мм.
L=(2500/2)+200 = 1450 мм
2) Определение напорного усилия по мощности двигателя, ![]() , кН
, кН
![]() , (17)
, (17)
где ![]() – максимальная мощность двигателя,
– максимальная мощность двигателя, ![]() (кВт)
(кВт)
![]() - коэффициент сопротивления колесной машины,
- коэффициент сопротивления колесной машины, ![]() ,
,
![]() – коэффициент буксования колесной машины,
– коэффициент буксования колесной машины, ![]() ,
,
![]() – КПД трансмиссии,
– КПД трансмиссии, ![]() ,
,
![]() – скорость рабочего хода машины,
– скорость рабочего хода машины, ![]() м/с
м/с
![]() - максимальное необходимое напорное усилие.
- максимальное необходимое напорное усилие.
![]() кН
кН
3) Определяем необходимое напорное усилие по условиям сцепления Тсц, кН движителя с поверхностью пути:
Тсц = Gп*φ, (18)
где φ – коэффициент сцепления 0,6 – 0,9;
Тсц = 130*0,9 = 117 кН
4) Выглубляющее усилие Nв, кН развиваемое гидроцилиндрами поворота ковша:
Nв=(2–3)*Qн, (19)
Nв=2*63= 126 кН.
5) Подъемное усилие Nп, кН развиваемое гидроцилиндрами поворота ковша:
Nп=(1,8–2,3)*Qн, (20)
Nп=2*63=126 кН
6) Углы запрокидывания ковша или захвата в нижнем положении – γз и разгрузки в верхнем – γр (рис. 1.4) принимаем в соответствии с рекомендациями на с. 33…34 [1].
Принимаем: γз = 450 и γр = 500
7) Определение параметров челюстного захвата
Радиус поворота нижней челюсти от оси отверстия для соединения со стрелой Rч= 1500 мм
Высота расположения оси отверстия шарнира для соединения со стрелой hч=100 мм
Радиус кривизны нижней челюсти rч=1200 мм
Координаты оси шарнира крепления верхней челюси
hшч=1400 мм Lч=1000 мм
Ширина захвата принимается равной ширине колее трактора Вв =1880 мм
Угол подъема вил нижней челюсти aч =5…7 град., принимаем aч =6 град.
Угол заострения вил bЧ =15….20 град., принимаем bЧ =18 град.
Угол поворота верхней челюсти должен быть не менее 100…110 град., принимаем 110 град. В полностью сомкнутом положении челюстей должен надежно удерживаться груз диаметром 250 мм (dmin)
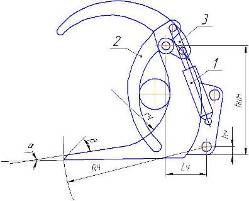
Рисунок 6 – Параметры челюстной захват для лесоматериалов:
1 – рама; 2 – подвижная челюсть; 3 – гидроцилиндр привода
Статьи о транспорте:
Разработка графика оборота электровозов
График оборота строится на основе расчетной ведомости оборота электровозов (форма ЦДЛ – 1,2). По графику оборота определяется потребность электровозов для резерва по неравномерности движения, устанавливается последовательность их работы, а также определяется загрузка экипировочных устройств и стой ...
Построение кривых движения и тока подвижного состава в прямом и обратном
направлениях
Под кривыми движения подвижного состава по перегону принято понимать зависимости скорости v и времени движения tот пройденного пути S. Исходными данными для этого расчета являются диаграмма ускоряющих и замедляющих сил, действующих на подвижной состав (рисунок 8) и профиль перегона, графическое из ...
Система защиты от помпажа
Система защиты от помпажа включает в себя электронный сигнализатор помпажа ЭСП12-1 (рис. 18) и логарифмический датчик давления ДОЛ-16 (рис. 19).
Электронный сигнализатор помпажа предназначен для формирования сигнала на автоматическое выключение двигателя при помпажном срыве компрессора.
Рис. 1 ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация