Определение угла сноса с использованием АРК

Автоматический радиокомпас (АРК.) — бортовое приемное устройство направленного действия, позволяющее определять направление на передающую радиостанцию. АРК совместно с наземными приводными и радиовещательными станциями образует угломерную систему самолетовождения.
При использовании радиокомпаса для самолетовождения экипажу необходимо знать следующие данные о приводных и радиовещательных станциях; место расположения (координаты); частоту работы и позывные; вид передачи; время работы и мощность.
Полёт от радиостанции в заданном направлении может быть выполнен в том случае, если она расположена на ЛЗП или её продолжении.
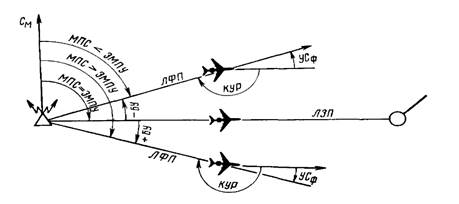
Контроль пути в полёте выполняют сравнением МПС с ЗМПУ.
В результате определяют боковое уклонение ВС от ЛЗП. Если МПС = ЗМПУ или отличается не более чем на 2°, то ВС находится на ЛЗП, если МПС больше ЗМПУ, то ВС находится правее ЛЗП, а если меньше — левее. Боковое уклонение и фактический угол сноса определяют по формулам:
БУ = МПС-ЗМПУ;
УСф = МПС-МК,
УСф = КУР -180°.
Магнитный пеленг
ВС МПС = МК+КУР±180°.
В практике МПС определяют по упрощенной формуле
МПС = МК±α,
где α = КУР— 180°. Знак «плюс» берется, если КУР>180°, знак «минус», если КУР<180°. При КУР=180° МПС = МК.
Пример. ЗМПУ=124°; МКР=135°; КУР=175°. Найти МПС, БУ и УСф. Решение. I. МПС = МК±α = 135°-5° = 130°.
2. БУ = МПС - ЗМПУ = 130° - 124° = + 6°.
3. УСф = КУР-180° = 175°- 180°= -5° или УСФ = МПС-МКР= 130°-135° = -5°.
Выполняя контроль пути по направлению с помощью АРК, следует учитывать, что радиопеленги определяют с погрешностями. Поэтому при равенстве МПС = ЗМПУ нельзя с полной уверенностью утверждать, что ВС находится на ЛЗП. В этом случае данное равенство всего лишь означает, что такое положение ВС наиболее вероятно, хотя в действительности оно может оказаться в стороне от ЛЗП.
При значительном уклонении ВС от ЛЗП, а также в случаях, когда необходимо строго следовать по ЛЗП, применяется полёт от радиостанции с выходом на ЛЗП.
Порядок выполнения полёта следующий:
точно проходят радиостанцию с МКр; через 5—15 мин полета отсчитывают КУР и рассчитывают
МПС = МК+КУР± 180°
или МПС = МК±α;
определяют сторону и значение бокового уклонения
БУ = МПС —ЗМПУ;
УСФ = КУР — 180°;
задаются углом выхода (20—90°), рассчитывают МКвых и выводят ВС на ЛЗП; МКи= ЗМПУ±УВЫХ (« + » при левом уклонении, «—» при правом уклонении) ; определяют момент выхода ВС на ЛЗП по КУРвых\= 180°±Увых (« -\- » при правом уклонении, « — » при левом уклонении); после выхода на ЛЗП устанавливают ВС на МК™ = МКР — ( ±БУ) или МКс-л = ЗМПУ — ( ±УСф); при полете по ЛЗП ведут контроль пути по направлению по КУРсп или МПСС.П: КУРст = 180° + (=ь УСФ); МПСС1 = = ЗМПУ.
 | |||

![]() ЗМПУ
ЗМПУ
![]() МПС
МПС
 | |||
 | |||
Пример. ЗМПУ = 90°; МКр = 88°; КУР=188°; Увых = 30ۨ. Определить данные для выхода и полета по ЛЗП.
Статьи о транспорте:
Приёмник температуры П-77
Приёмник температуры П-77 является чувствительным элементом системы, предназначенной для измерения температуры жидкостей и газов в пределах от минус 60°C до 260°C.
На двигателе устанавливается пять приёмников температуры П-77 (рис. 10).
Два приёмника температуры размещаются на коробке моторных а ...
Показатель политропы расширения
Средний показатель адиабаты расширения :
;
.
2.5.
Степень последующего расширения:
;
Давление в МПа и температура в градусах Кельвина (К) в конце процесса расширения:
;
;
Таблица 2.4― Значения параметров процесса расширения
Тип двигателя
Параметры
, МПа
...
Авиатранспортный маркетинг и анализ конъюнктуры рынка воздушных перевозок
В последние годы широкое распространение получил новый метод управления деятельностью компаний и фирм, который получил название «маркетинг». Этот термин происходит от английского слова «market», что означает рынок, а само слово «marketing» означает сбывать продукцию на рынке. Этот термин получил о ...
Разделы сайта
- Главная
- Железнодорожный транспорт в России
- Развитие промышленного транспорта
- История трактора
- Воздушный транспорт
- Испытания и сдача судов
- Работа автосалона
- Информация